


Aus pink wird grau und aus PLA wird PETG
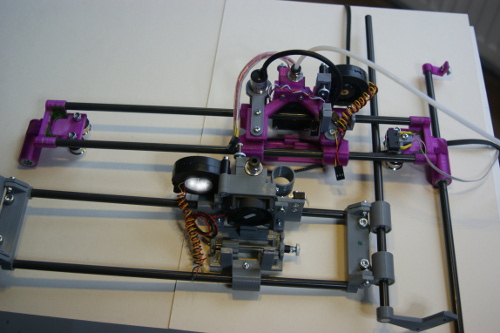 Nicht nur das Material sondern auch die Konstruktion hat sich verändert. Die Wellen der X-Achse und die Umlenkrollen der X-Achse haben nun einen größeren Abstand zu einander und liegen jetzt auch in einer Ebene, um noch besser die X-Achse zur Y-Achse im rechten Winkel zu halten. Die Ausrichtung passiert nach dem Spannen des durchgehenden Riemens dadurch, dass dieser lediglich mittig auf dem X_Schlitten fixiert wird. Die gesamte X-Achse einschließlich aller Armaturen und Alu-Wellen wiegt ca. 440g. Damit lassen sich schon Druckgeschwindigkeiten realisieren, die nur noch durch die Leistung des Heatends und den Stepper-Treibern begrenzt werden.
Nicht nur das Material sondern auch die Konstruktion hat sich verändert. Die Wellen der X-Achse und die Umlenkrollen der X-Achse haben nun einen größeren Abstand zu einander und liegen jetzt auch in einer Ebene, um noch besser die X-Achse zur Y-Achse im rechten Winkel zu halten. Die Ausrichtung passiert nach dem Spannen des durchgehenden Riemens dadurch, dass dieser lediglich mittig auf dem X_Schlitten fixiert wird. Die gesamte X-Achse einschließlich aller Armaturen und Alu-Wellen wiegt ca. 440g. Damit lassen sich schon Druckgeschwindigkeiten realisieren, die nur noch durch die Leistung des Heatends und den Stepper-Treibern begrenzt werden.
Insgesamt ist die Konstruktion auf Minimalgewicht ausgelegt, um das Trägheitsmoment auf ein Minimum zu reduzieren. Die Wellen sind außer dem Gewicht der Achsen keinerlei weiteren Kräften ausgesetzt, so dass die Verwendung von Aluwellen unproblematisch ist. Problematisch ist weiterhin die hohen Reibungsverluste, die an den Umlenkrollen entstehen. Es müssen für den X-Schlitten immerhin 6 Rollen bewegt werden.
 Als Steppertreiber kommen nun Treiber mit einem TMC2208-Chip zum Einsatz, die ausschließlich im Silent-Mode betrieben werden. Die Lautstärke hat sich damit signifikant reduziert und beträgt etwa 50 bis 55 db bei einem Abstand von 0,5 m vom Drucker. Allerdings ist auch die maximale Fahrgeschwindigkeit reduziert, die jetzt bei 80 mm/s liegt, wenn man keine Schrittverluste hinnehmen möchte. Das ist auch gleichzeitig die Grenze, die beim PETG-Drucken mit einer 0,2 mm Düse nicht überschritten werden kann, weil sonst das Filament nicht genügend aufgeheizt wird und damit die Extrusion hemmt.
Als Steppertreiber kommen nun Treiber mit einem TMC2208-Chip zum Einsatz, die ausschließlich im Silent-Mode betrieben werden. Die Lautstärke hat sich damit signifikant reduziert und beträgt etwa 50 bis 55 db bei einem Abstand von 0,5 m vom Drucker. Allerdings ist auch die maximale Fahrgeschwindigkeit reduziert, die jetzt bei 80 mm/s liegt, wenn man keine Schrittverluste hinnehmen möchte. Das ist auch gleichzeitig die Grenze, die beim PETG-Drucken mit einer 0,2 mm Düse nicht überschritten werden kann, weil sonst das Filament nicht genügend aufgeheizt wird und damit die Extrusion hemmt.
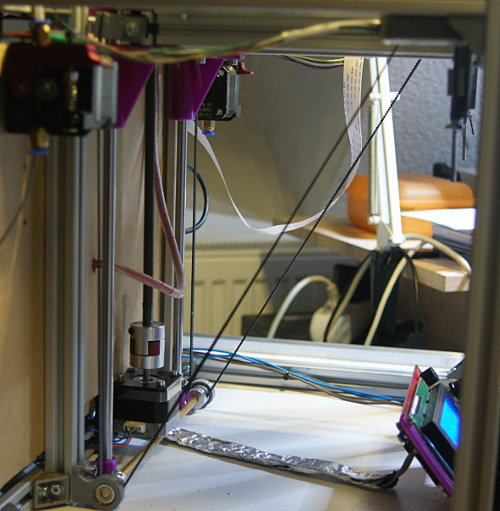
Die Kinematik der Z-Achse mit den als doppeltes Z verlegten Riemen hat sich bewährt und wird in dieser Form auch beibehalten. Der Tisch ist ohne Nivellier-Schrauben mit eine Wärmedämmung fest zusammen montiert. Er wird einseitig über eine Gewindestange geliftet und über zwei Gleitlager an den Stahlwellen geführt. Sämtliche Versuche, mit zwei Z-Antrieben zu arbeiten, sind kläglich gescheitert. Die andere Seite des Tisches wird mit den beiden Riemen über Umlenkrollen synchron geliftet. Die antriebsseitigen Umlenkrollen sind Zahnritzel, die miteinander über eine Welle starr gekoppelt sind. Einseitg wird über einen Riemenspanner zwischen rechts und links nivelliert. An der Vorderseite wird der Tisch abschließend mittels zweier Riemenspanner der Tisch zwischen vorn und hinten nivelliert, wobei die Gegenspannung durch ein zusätzliches Gewicht am Heiztisch realisiert wird. Hier ist lediglich ein Nachspannen nach den ersten Betriebsstunden notwendig. Den Rest erledigt der Näherungssensor zusammen mit der Firmware.
Derzeit bekommt das Gerät noch eine Abzugshaube, um eventuelle Feinstaubemmissionen über einen Filter zu minimieren. Damit ist dann auch die Beta-Phase abgeschlossen und nun kommt das nächste Projekt, das ich TIzzy nenne.
Dezember 2018