


Das Spiel der Kräfte
Die Mechanik teilt sich in Dynamik und Kinematik. Um zu einer Entscheidung über eine bestimmte Kinematik für einen 3D-Drucker zu kommen müssen wir aber auch die Dynamik betrachten. Es gibt eine Reihe verschiedener Bauarten, bei dieser Betrachtung geht es aber hauptsächlich um die H-Bot-Kinematik und speziell um die CoreXY-Kinematik.
 In der Abb. 1a ist ein einfacher Antrieb in Ruhe dargestellt. Um den Schlupf zu minimieren ist eine bestimmte Spannung des Riemens notwendig. Man liest oft, dass ein gut gespannter Riemen nach dem An-zupfen einen 80 Hz Ton wieder gibt. Hängt man an einen etwa 40 cm langen PT2-Riemen ein Gewicht von einem Kilogramm, so kommt man den 80 Hz sehr nahe. Die ideale Spannkraft liegt also bei etwa 10 N. Die roten Pfeile zeigen die Spannkräfte und die grünen Pfeile zeigen die Gegenkräfte, die durch die Lagerung der Umlenkrollen bzw. des Steppers aufgebracht werden müssen.
In der Abb. 1a ist ein einfacher Antrieb in Ruhe dargestellt. Um den Schlupf zu minimieren ist eine bestimmte Spannung des Riemens notwendig. Man liest oft, dass ein gut gespannter Riemen nach dem An-zupfen einen 80 Hz Ton wieder gibt. Hängt man an einen etwa 40 cm langen PT2-Riemen ein Gewicht von einem Kilogramm, so kommt man den 80 Hz sehr nahe. Die ideale Spannkraft liegt also bei etwa 10 N. Die roten Pfeile zeigen die Spannkräfte und die grünen Pfeile zeigen die Gegenkräfte, die durch die Lagerung der Umlenkrollen bzw. des Steppers aufgebracht werden müssen.
In den Abbildungen sind mit blauen Pfeilen die Kräfte dargestellt, die bei einem Antrieb des Riemens wirken. Im System addieren sich die Zugkraft und die Antriebskräfte. Der Grüne Pfeil zeigt die Bewegungsrichtung der angetrieben Schlitten. Die Kräfte wirken auf einer Achse, die hier in Abb. 1 die Y-Achse sein soll.
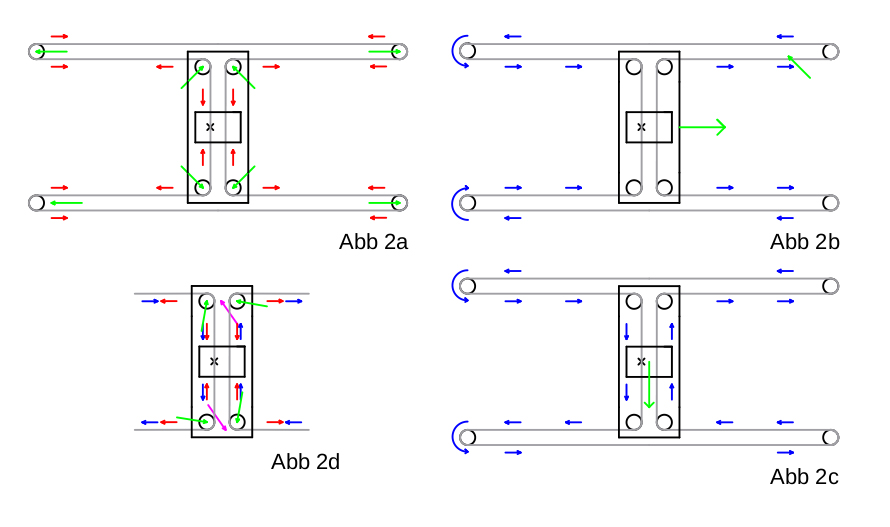 Legt man eine zweite Y-Achse parallel, verbindet die beiden Schlitten starr miteinander und setzt darauf um 90° zur Y-Achse gedreht eine weitere Achse, hier die X-Achse mit einem eigenen Schlitten, dann entsteht wie in der Abb. 2 ein liegendes "H". Zusätzlich befindet sich an allen vier Ecken des Y-Schlittens je eine Umlenkrolle, so dass wir den Riemen über alle beteiligten Stepper und Umlenkrollen führen können. Nur die Zugkräfte betrachtet, ist das Bild ausgewogen und die Kräfte-Vektoren heben sich gegenseitig auf.
Legt man eine zweite Y-Achse parallel, verbindet die beiden Schlitten starr miteinander und setzt darauf um 90° zur Y-Achse gedreht eine weitere Achse, hier die X-Achse mit einem eigenen Schlitten, dann entsteht wie in der Abb. 2 ein liegendes "H". Zusätzlich befindet sich an allen vier Ecken des Y-Schlittens je eine Umlenkrolle, so dass wir den Riemen über alle beteiligten Stepper und Umlenkrollen führen können. Nur die Zugkräfte betrachtet, ist das Bild ausgewogen und die Kräfte-Vektoren heben sich gegenseitig auf.
Der Riemen ist an einer Stelle des X-Schlittens fixiert. Drehen sich wie in der Abb. 2b jetzt die Antriebe entgegen gesetzt mit gleicher Drehzahl, dann wirken die Antriebskräfte gleichmäßig auf den Y-Schlitten und bewegen diesen parallel zur Y-Achse.
Drehen sich die Antriebe jedoch gleichsinnig wie in Abb. 2c, dann soll der Y-Schlitten in Ruhe verbleiben, aber sich die darauf montierte X-Achse mit dem X-Schlitten in die vorgegeben Richtung bewegen. Betrachtet man sich die grün dargestellten Kräftevektoren der addierten Kräfte in Abb. 2d, dann fällt auf, dass die Kräfte an den Umlenkrollen auf dem Y-Schlitten sich nicht mehr aufheben, Die wirkenden Antriebskräfte versuchen die Y-Achse zu drehen. Bei der H-Bot Kinematik kann diese Drehung nur duch die entsprechende Auslegung der Führung des Y-Schlittens unterbunden werden.
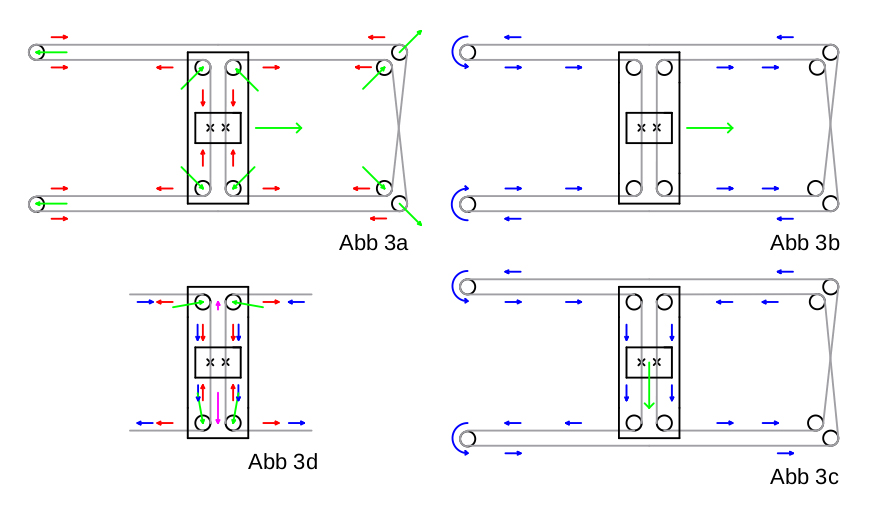 Fügt man, wie in Abb. 3 zwei weitere Umlenkrollen dazu und und führt darüber den Riemen zu der jeweils gegenüberliegenden Seite des X-Schlittens und fixiert auch den zweiten Riemendurchgang am X-Schlitten, dann ergibt sich im Stillstand ein ähnliches Bild wie beim H-Bot. Auch der gegensinnige Antrieb wie in Abb. 3a führt zu einem gleichen Ergebnis. Der Unterschied macht sich erst bemerkbar, wenn die beide Antriebe wie in Abb 3c im gleichen Drehsinn betrieben werden. Addiert man nun alle Kräfte und rechnet die resultierenden Vectoren in der Abb. 3d gegeneinander auf, so wirken die Kräfte geradlinig nur noch auf den X-Schlitten. Es sind nun keine wesentlichen zusätzlichen Maßnahmen mehr nötig, um die X- und Y-Achse gegeneinander in einem rechten Winkel zu halten.
Fügt man, wie in Abb. 3 zwei weitere Umlenkrollen dazu und und führt darüber den Riemen zu der jeweils gegenüberliegenden Seite des X-Schlittens und fixiert auch den zweiten Riemendurchgang am X-Schlitten, dann ergibt sich im Stillstand ein ähnliches Bild wie beim H-Bot. Auch der gegensinnige Antrieb wie in Abb. 3a führt zu einem gleichen Ergebnis. Der Unterschied macht sich erst bemerkbar, wenn die beide Antriebe wie in Abb 3c im gleichen Drehsinn betrieben werden. Addiert man nun alle Kräfte und rechnet die resultierenden Vectoren in der Abb. 3d gegeneinander auf, so wirken die Kräfte geradlinig nur noch auf den X-Schlitten. Es sind nun keine wesentlichen zusätzlichen Maßnahmen mehr nötig, um die X- und Y-Achse gegeneinander in einem rechten Winkel zu halten.
Diese Lösung ist so stabil, dass man die Wellen der Y-Achse ausbauen kann und die X-Achse frei schwebend an den vier Umlenkrollen im rechten Winkel zur Y-Achse gehalten wird. Die Wellen an der Y-Achse dienen also lediglich dazu, die Führung zu verbessern und die Schwerkraft, die das Y-Bett mit X-Achse nach unten zieht, abzufangen. Bei der X-Achse nehmen die Wellen die Kräfte, die an den 4 Umlenkrollen wirken auf und tragen den Druckkopf mit Lüftern, Nivelliereinrichtung und die Spannvorrichtung für den Riemen. Ich verwende einen durchgehenden Riemen, der zunächst gespannt wird und anschließend in Mittelstellung am zweiten Riemendurchgang fixiert wird. Eventuelle Abweichungen vom rechten Winkel beider Achsen lassen sich nun durch geringfügige Änderung der Riemenspannung korrigieren.
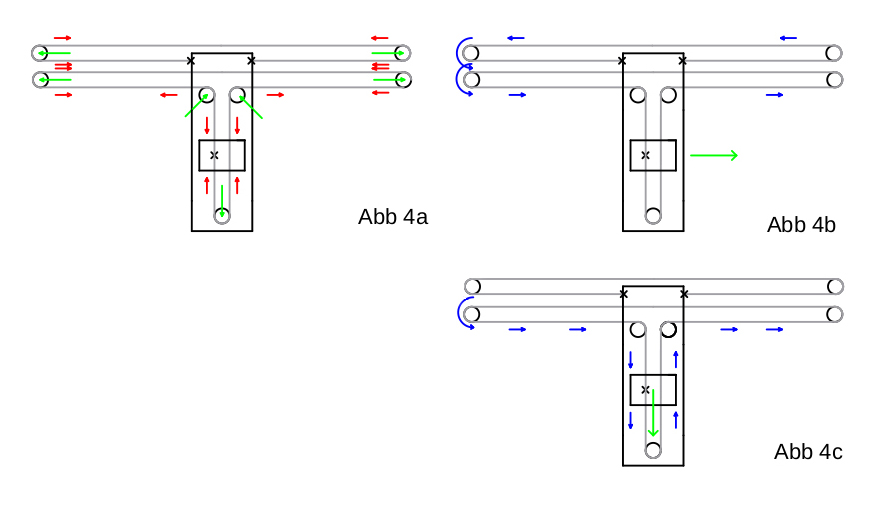
Eine weitere Variante ist die Kinematik in den Abbildungen 4. Separiert man den Antrieb für den Y-Schlitten, dann lässt sich der X-Schlitten ausschließlich über den X-Antrieb bewegen. Soll der Y-Schlitten bewegt werden, dann muss der X-Antrieb synchron mitlaufen. Idealerweise befinden sich die Ankerpunkte des Riemens der Y-Achse ober- oder unterhalb der beiden Umlenkrollen des Y-Schlittens, so dass tatsächlich alle horizontal wirkenden Kräfte im System sich aufheben. Aber auch hier wie beim CoreXY wird der Y-Schlitten durch die gleichmäßig wirkenden Zugkräfte im rechten Winkel zur Y-Achse gehalten. Vorteilhaft scheint dabei auch die halbierte Länge des X-Zahnriemens und die Halbierung der Anzahl von Umlenkrollen. Unklar ist noch, ob diese Kinematik von den Firmwares unterstützt wird. Die Idee dazu lieferte eine Skizze, bei der allerdings der Antrieb des Y-Schlittens gegenüber des Antriebes der X-Schlittens lag. Das sich daraus ergeben Bild ist wiederum ein liegenden "H". Ich vermute, dass es vorteilhafter ist, beide Antrieb auf eine Seite zu legen, so das die wirkenden Kräfte auf den Y-Schlitten konzentriert sind. Nun finden sich die Buchstaben "T" und liegend ein "I" in der Kinematik.
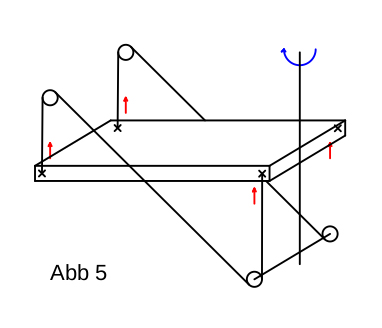
Abschließend noch meine Lösung für den Bautisch mit das Heizbett an der Z-Achse. Ein Antrieb hebt den Tisch mittig zwischen den Gleitlagern. Um die gegenüberliegende Seite synchron zu heben, wird beidseitig ein Riemen unten über starr miteinander verbundenen Zahnritzel und an der gegenüberliegenden Seite über normale Umlenkrollen geleitet, die angetrieben Seite hebt also die antriebslose Seite. Mittels eines Riemenspanners auf der Antriebsseite wird der Tisch in die Waage gebracht und mittels zweier Riemenspanner auf der antriebslosen Seite wird der Tisch über die Tiefe nivelliert. Diese Dreipunktnivellierung geht wesentlich einfacher, als die Nivellierung an allen vier Ecken des Tisches. Um die nötige Riemenspannung zu erhalten, ist der Tisch auf der gegenüberliegenden Seite zusätzlich mit Gewichten belastet.
Kleiner Nachtrag noch; die CoreXY-Kinematik ist patentrechtlich geschützt, die H-Bot-Kinematik wurde wegen der Einfachheit als Patent abgelehnt.
November / Dezember 2018